Siemens PLC управляет роботами Yamaha
время выпуска:2023-01-28 16:00:06
В этой статье представлена стратегия управления роботом Yamaha, управляемым Siemens PLC, с использованием внешнего порта ввода-вывода для установки командного слова, чтобы PLC мог общаться с роботом и инструктировать робота завершить соответствующее действие.
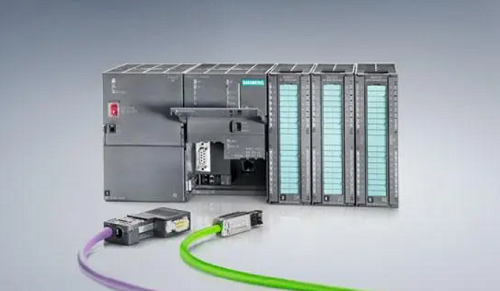
Siemens S7-300PLC - это широко используемый большой и средний ПЛК в нашей стране в настоящее время, исследования по нему и стратегия управления периферийным роботом в области автоматизации устройств имеют большое значение. В этой статье, основанной на исследованиях и производстве литиевой аккумуляторной линии, завершено взаимодействие и управление роботом Siemens S7300PLC и Yamaha, а также завершено исследование и разработка двух ключевых процессов стального стержня и штамповки в процессе устройства литиевой батареи.
1. Общий дизайн оборудования
Соединение Siemens S7-300PLC и контроллера робота YAMAHA должно соединять сигнал запуска робота, сигнал аварийной остановки, сигнал неисправности и сигнал сброса через четыре группы сигналов и соединение PLC может достигать основных требований управляющего робота. PLC соединен с роботом. Как правило, PLC используется в качестве стороны отправки инструкций, а робот используется в качестве стороны получения инструкций. Чтобы достичь цели робота управления PLC, идущего к каждой точке, необходимо установить связь PLC и IO робота.
В сочетании с технологическими исследованиями процедур стальной укладки и штамповки в процессе устройства литиевой батареи получается, что точки ходьбы робота не будут превышать 16 баллов. Согласно расчету точек по 8421, точки соединения робота и ПЛК составляют 4 балла. Стандартный робот PNP выбирается для подключения к Siemens. Сигнальное соединение включает в себя две части: одна часть - сигнал запуска, аварийной остановки, неисправности и сброса; Одна часть - линия связи между ПЛК и роботом в четырех точках; Есть восемь наборов сигналов.
2. Общий дизайн программного обеспечения
Стратегия управления программным обеспечением для запроса робота, метод команды PLC для осуществления всего управления. Возьмите робота-штабелирования в качестве примера, робот отправляет сигнал 1001 запрос после возврата, робот получает сигнал в соответствии с инженерными требованиями, робот проинструктирован идти в целевую ориентацию, сигнал целевой ориентации (0001 -- 1011) в общей сложности 9 точек, получить положение робота движется на месте, вместе на месте после отправки сигнала для информирования робота на месте, робот контролирует действие других периферийных устройств (цилиндров, двигателей и т. д.) и сообщает роботу вернуться в положение после завершения действия. После того, как робот возвращается на позицию, он продолжает ждать инструкции по настройке. Цикл действия заканчивается.
Благодаря связи и управлению между Siemens S7-300PLC и роботом Yamaha завершено исследование и разработка стального стержня и штамповка двух ключевых процессов в процессе устройства литиевой батареи. ПЛК и робот с помощью метода концевой связи передачи сигнала, используемого в поле устройства батареи, имеют хорошую демонстрационную роль; Может использоваться в другой последовательности устройств батареи, другом эталонном ПЛК и методе управления роботом и стратегии управления, может положить конец большей части робота управления ПЛК к месту работы, имеет хороший эффект продвижения.
-
 202212-29
202212-29Mitsubishi plc и метод настройки компьютерной связи
Откройте программное обеспечение для программирования Mitsubishi plc, меню & quot; Online & quot; & gt; & quot; Настройки передачи···
-
 202301-30
202301-30Метод установки параметров преобразователя частоты АББ
1. GROUP99 Параметры: применить макрос для выбора стандартного макроса, рейтинг двигателя в соответствии с данным···
-
 202212-29
202212-29Инструкция выборки Mitsubishi и инструкция вывода
1. LD (команда fetch) нормально открытый контакт и команда подключения левой шины, каждая логическая строка с норм···
-
 202302-08
202302-08Метод проводки шкафа управления Шнайдер ПЛК
(1) При размещении сигнальных кабелей с различными свойствами в одном и том же канале они должны быть изолиров···
-
 202301-12
202301-12Введение в техническое обслуживание Delta PLC
1. Включенный свет Delta PLC не включен, мерцает ОШИБКА, возможная причина: нет программы2. Delta PLC не может общаться с···


 +86 13811814778
+86 13811814778 +86 13811814778
+86 13811814778
 Дом 26, община Лиюань, район Чаоян, Пекин, Китай
Дом 26, община Лиюань, район Чаоян, Пекин, Китай